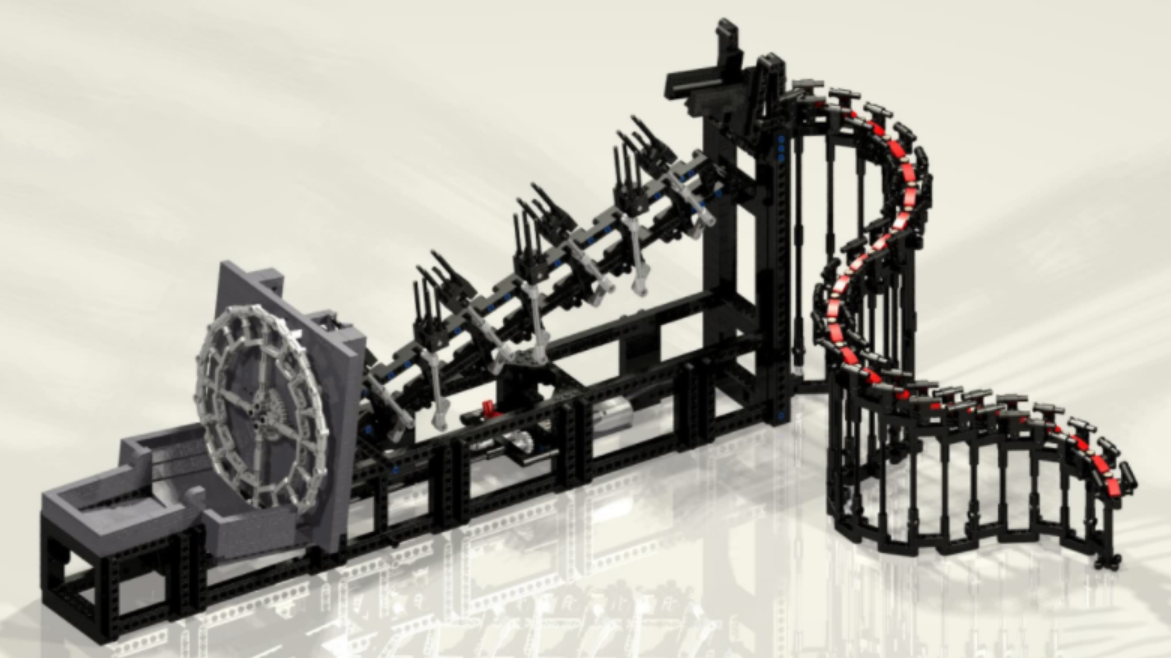
在这个新的GBC模块中,两个带有勤奋工作者的小型机器人左右摆动他们的手臂等待球来。当机器人抓住向前滚动的球时,它会迅速向后转并投掷球。该机器人仅在球到来时执行抓取和携带球的操作。换句话说,抓住球会触发向后投球的动作。拥有两个机器人的原因是为了确保标准每秒1球的处理速度。
在模块的入口处有一个阶梯式供应,将进入的球分成两个车道。在该模块中,所有操作均由一个电机执行。 该模块具有复杂的机构并且由于驱动单元的摩擦而易于失效。驱动单元经过多次重新设计,旨在创建一种不会产生摩擦的结构。28齿转盘单独使用黑色28齿齿轮,无需与顶部和底部结合使用。这是为了防止由转盘上的摩擦引起的问题。最初,转盘在上部和下部组合使用,但是当它长时间操作时,摩擦增加并且发生故障。
这个创意出自
![]()
感兴趣的朋友可以去看一下原作者的分享,
这里给大家提供下 搭建指导图纸(会员登录 享受5折下载)。