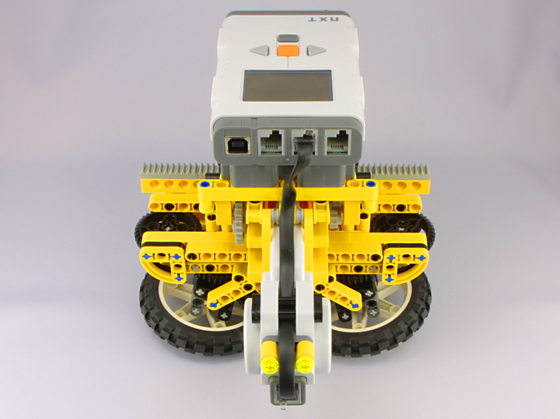
单电机双足行走的机器人。
此外,该机器人可以改变行进方向。(我的木有加这个传感器)
超声波传感器安装在背面。如果你觉得有些障碍,那就继续移动当时正在移动的腿。即使在U转弯时,您也可以在现场自由旋转。 
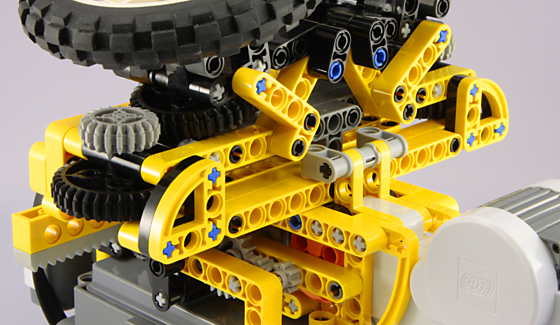
齿轮伸展和分离的机构的一部分。我个人称之为“分离技术”。
个人观点 单电机控制 左右移动 外加上半身左右晃动,这个齿轮传动装置的链接确实是挺麻烦的。多亏有这个 离合齿轮才可以使得这个结构可以平稳运行。
复刻作品 发布至 抖音了 感兴趣的朋友可以移步看下成品

搭建图纸 共计78页,分为上下两部分,可直接下载。