以前听过一个事情,说哈工大的实验室,有个日本进口的小型机械手,有天有人问哈工大那边的人,为什么不把这个机械手拆开,给再仿制一个。哈工大的人也很实诚了,说拆了怕装不回去。
在制造业待过的心理肯定都清楚,中国制造业现在是什么样子。不过无所谓了,炒房兴邦,实业误国。
这个模型跟上个垃圾桶一样,复刻于俄罗斯的一波视频中。
个人觉得可以看成EV3官方软件自带中的那个机械手的简化版。
不过官方的模型多少有种艺术的感觉,将零件的价值,发挥的淋漓尽致。
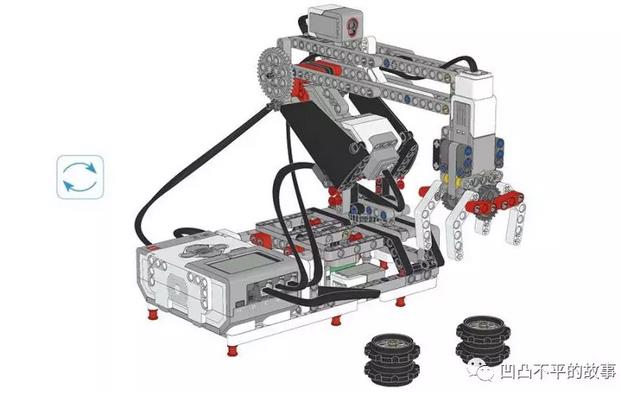
这个模型就有点简单粗暴了。
程序比较容易。
step1.检测是否回到初始位置;
step2.检测右侧物品区域,是否有物品;
step3.发现物品,则运动到指定位置,夹取—-抬升—–回到初始位置—-落下—–松开。
注意:
1、夹子初始位置不要张的太开,以免在运动过程中,碰到线;
2、因为做搭建图时,底部负责旋转的大型电机上的小齿轮,我忘记装了,再装上去时,会发生零件的干涉。所以我就将这部分零件放置在外侧了。
3、颜色传感器那使用的是反射光模式,建议两个3孔梁,使用较为明亮的颜色;
搭建图纸 以及程序指导